ROP simulation using Generative Deep Learning
Drilling and Eploration
Is one of the fields where tonnes of data are collected daily. It is also one of the areas where applying Machine Learning and AI can bring significant benefit making it faster, cheaper, efficient and safer.
Objectives and Goals
The purpose of the study is to analyze the performance and drilling efficiency of a given well, as well as model ROP using Generative Machine Learning Techniques:
- ► estimate drilling efficiency using statistics;
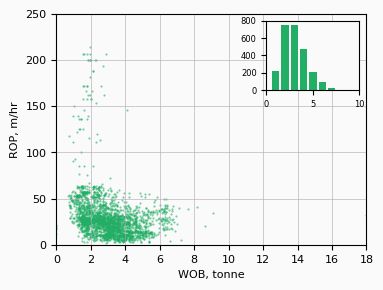
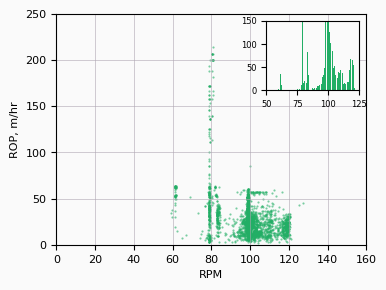
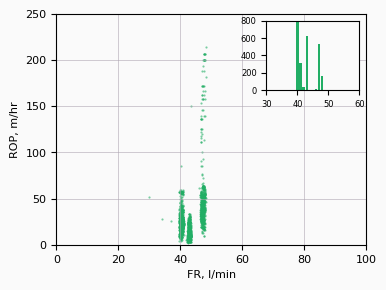
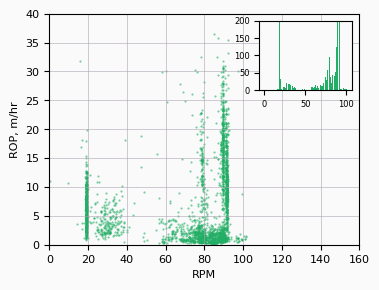
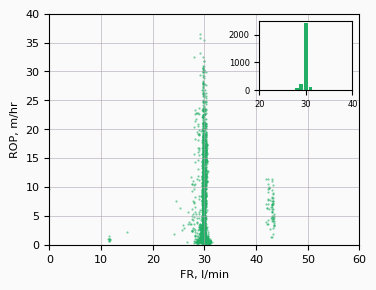
- ► analyze the correlation between ROP and Drilling Parameters;
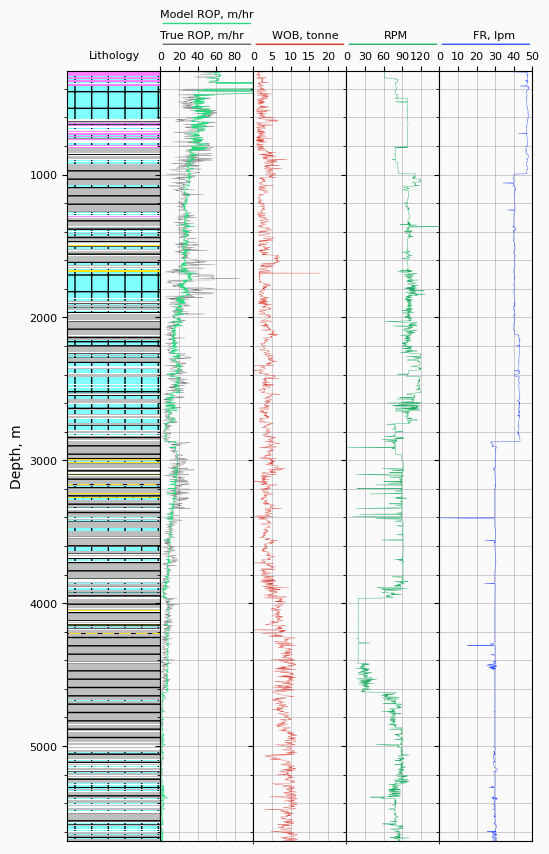
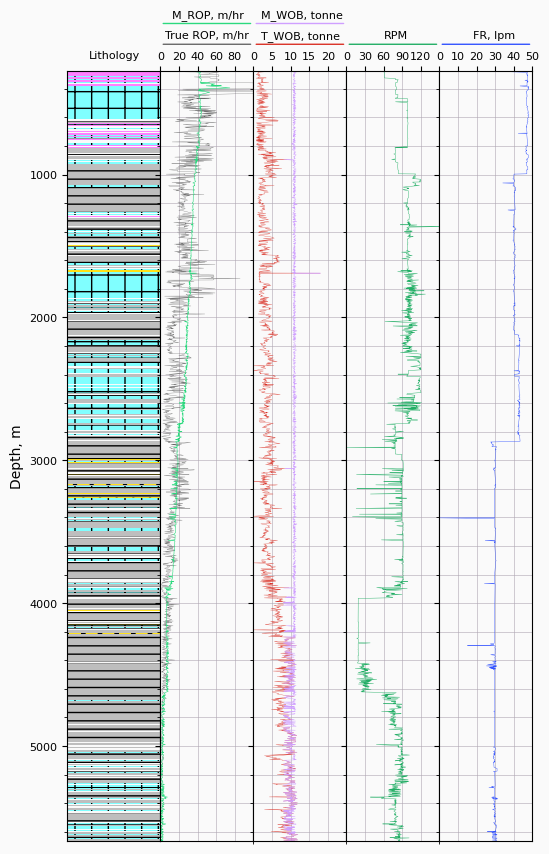
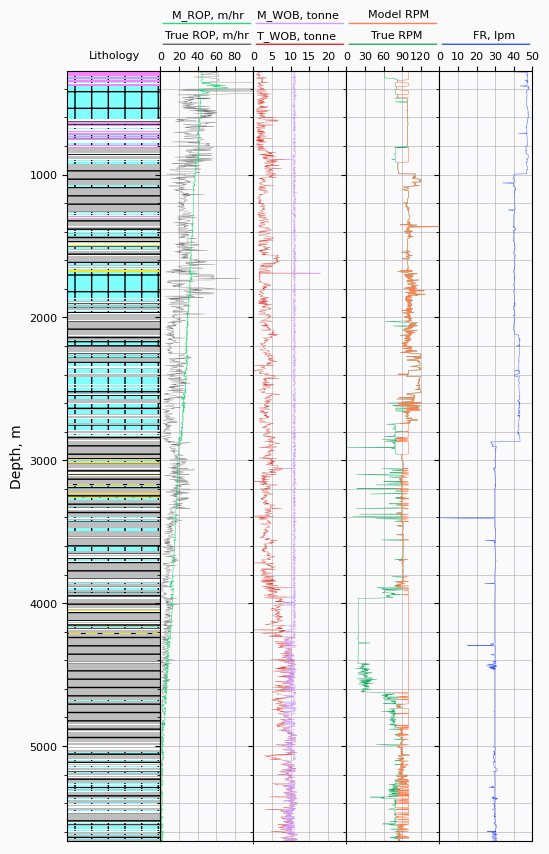
- ► model ROP in different drilling scenarios using Machine Learning.
Dataset
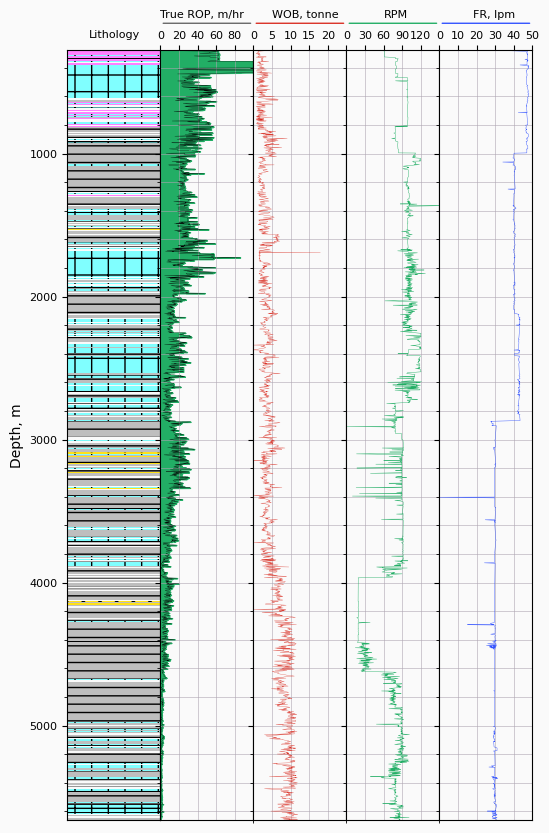
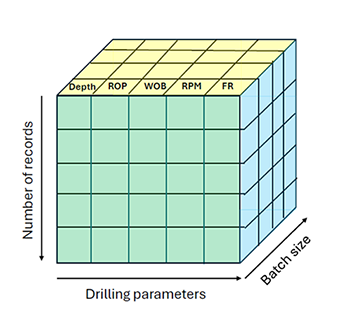
The dataset that was used for this study consists of the following parameters:
- ● Depth - Measured Depth
- ● ROP - Rate of Penetration
- ● WOB - Weight on Bit
- ● RPM - Rate per Minute
- ● FR - Flow Rate